Roboty dostaną ludzkie mięśnie! Ten przełom w druku 3D zmienia wszystko
by Marek 23 maja, 2026
Wyobraź sobie poranek za kilka lub kilkanaście lat. Spacerujesz po parku, mijasz przechodnia i nie masz zielonego pojęcia, że to zaawansowany android. Brzmi jak scenariusz klasycznego kina science-fiction, jednak współczesna inżynieria z każdym dniem przybliża nas do tej wizji. Przez dekady rozwoju robotyki wyposażyliśmy maszyny w sztywne szkielety, potężne procesory pełniące funkcję mózgu, zaawansowane zmysły, a nawet cyfrowe układy nerwowe. Największym wyzwaniem okazało się jednak coś, co dla nas jest całkowitą oczywistością – biomimetyczne, elastyczne mięśnie, które pozwalają na płynną i bezpieczną interakcję z otoczeniem.
Dlaczego roboty potrzebują miękkich mięśni?
Naukowcy z prestiżowej Szkoły Inżynierii i Nauk Stosowanych Johna A. Paulsona na Uniwersytecie Harvarda (SEAS) dokonali właśnie fundamentalnego przełomu w tej dziedzinie. Opracowali oni pionierską metodę druku 3D sztucznych włókien mięśniowych, których mechanika i sposób poruszania się są programowane bezpośrednio w strukturze samego materiału. To prawdopodobnie najbliższa replika ludzkiej muskulatury, jaką kiedykolwiek udało się stworzyć w laboratorium. I choć wizja buntu maszyn wyposażonych w ludzkie tkanki działa na wyobraźnię, technologia ta ma przed sobą zupełnie inne, niezwykle praktyczne zastosowania.
Naturalny świat, który nas otacza, opiera się na elastyczności. Od drzew uginających się na wietrze, przez rozciągliwe dżdżownice, aż po niezwykle zwinne ośmiornice – natura unika sztywności, ponieważ to elastyczność gwarantuje przetrwanie. Co więcej, my sami zbudowaliśmy cywilizację, która bezwzględnie wymaga tej plastyczności. Nasza infrastruktura, odzież, codzienne narzędzia, a nawet normy interakcji społecznych zostały zaprojektowane wokół mechaniki miękkich, biologicznych ciał.
Dotychczas inżynierowie starali się upodobnić maszyny do ludzi poprzez implementację systemów wizyjnych (oczu), mikrofonów (uszu), głośników (ust) oraz setek sensorów dotyku. Rozwiązania te działają znakomicie, ale integracja sztywnego robota z miękkim środowiskiem człowieka rodzi ogromne problemy. Tradycyjne roboty przemysłowe poruszają się za pomocą silników elektrycznych, hydrauliki i pneumatyki. Choć są niesamowicie precyzyjne i silne, pozostają kanciaste, mechanicznie skomplikowane i potencjalnie niebezpieczne w bezpośrednim kontakcie z ludzkim ciałem. Prawdziwie płynny, organiczny ruch pozostawał dotąd poza ich zasięgiem.
Warto zauważyć, że ludzki mięsień to genialny w swojej prostocie i jednocześnie absurdalnie wręcz skomplikowany system aktuacji. Kiedy myślisz o podniesieniu ręki, dzieje się to niemal magicznie. Ta sama tkanka, która potrafi z mikroskopijną czułością prowadzić pędzel po płótnie, w ułamku sekundy może wygenerować siłę zdolną do wyważenia drzwi lub z niesamowitym refleksem złapać spadający kieliszek, zanim ten dotknie ziemi. Taki poziom kontroli to inżynieryjny Święty Graal.
Rewolucja ukryta wewnątrz materiału
Próby stworzenia miękkich robotów nie są rzeczą całkowicie nową. Już wcześniej konstruowano tzw. pneumatyczne sztuczne mięśnie (PAM), które wykorzystywały sprężone powietrze do naśladowania biologicznych ruchów. Eksperymentowano również ze stopami z pamięcią kształtu reagującymi na temperaturę, polimerami elektroaktywnymi czy systemami ścięgien sterowanych kablami. Niestety, każda z tych technologii niosła za sobą ogromne kompromisy. Wymagały one ciężkich, głośnych kompresorów zewnętrznych, skomplikowanego okablowania, generowały potężne ilości ciepła lub potrzebowały ekstremalnie wysokiego napięcia elektrycznego. W efekcie sztuczny mięsień stanowił jedynie ułamek ogromnej i nieporęcznej machiny.
Zespół z Harvardu podszedł do problemu z zupełnie innej, niezwykle eleganckiej strony. Zamiast budować skomplikowane systemy peryferyjne, postanowili zakodować ruch wewnątrz samego surowca za pomocą zaawansowanego druku 3D. Kluczem do sukcesu okazało się połączenie dwóch skrajnie różnych materiałów: elastomeru ciekłokrystalicznego (LCE), który kurczy się i zmienia kształt pod wpływem ciepła, oraz pasywnego elastomeru, który stawia opór deformacjom.
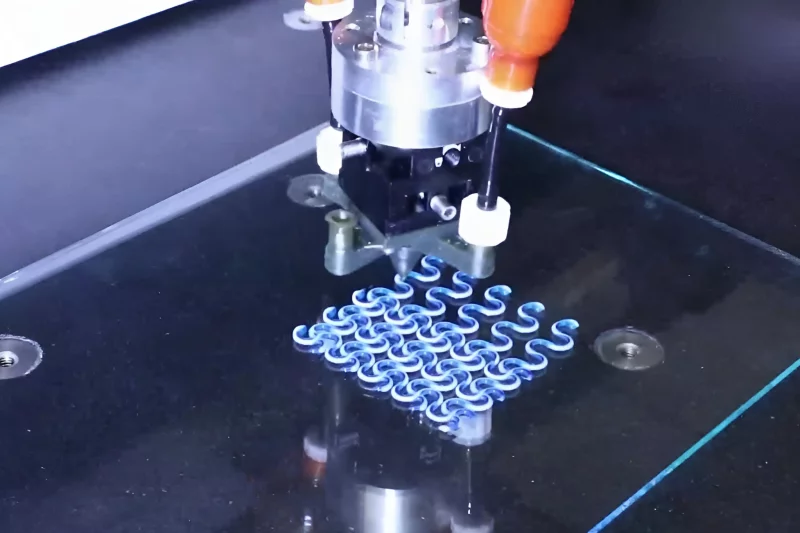
Dzięki zastosowaniu specjalnej, obrotowej dyszy drukującej, naukowcy byli w stanie nakładać oba te materiały bezpośrednio obok siebie z precyzją co do mikrona. Gdy filament zostaje poddany działaniu temperatury, materiał aktywny zaczyna się kurczyć w ściśle określonym kierunku molekularnym. Ponieważ materiał pasywny blokuje ten proces, powstające naprężenie zmusza całe włókno do wyginania się, zwijania w spiralę lub rotacji. Poprzez obracanie dyszy w trakcie drukowania, badacze dosłownie „zapisują” helikalne wzory wyrównania molekularnego wewnątrz struktury, programując przyszłe zachowanie materiału.
Od teorii do praktyki: chwytaki i inteligentne struktury
W praktyce oznacza to, że pojedynczy, wydrukowane na drukarce 3D mięśnie potrafią się prostować, kurczyć, rozszerzać lub zwijać bez użycia jakichkolwiek kół zębatych, sztywnych przegubów czy zewnętrznych siłowników. Aby udowodnić potęgę tego rozwiązania, zespół z Harvardu przeprowadził serię spektakularnych demonstracji. Wydrukowano pofalowane włókna oraz płaskie, elastyczne siatki, które po podgrzaniu w ułamku sekundy transformowały się w trójwymiarowe kopuły.
Najbardziej imponującym pokazem możliwości nowej technologii było stworzenie miękkich chwytaków robotycznych. Te pozbawione tradycyjnej mechaniki struktury potrafiły samodzielnie obniżyć się nad testowy obiekt, delikatnie, ale pewnie zacisnąć się wokół niego, podnieść go, a po ochłodzeniu materiału – bezpiecznie zwolnić uścisk.
Zastosowanie tej metody wykracza daleko poza samą robotykę humanoidalną. Naukowcy wskazują, że technologia ta może zrewolucjonizować rynek nowoczesnych wyrobów medycznych, biomedycznych implantów, filtrów adaptacyjnych, które dynamicznie zmieniają swoją przepustowość. A także inteligentnych materiałów budowlanych reagujących na zmiany pogodowe. Kompatybilność z technologią druku 3D oznacza również, że możemy personalizować kształt i funkcję mięśni pod konkretne, bardzo niszowe zastosowania, co przy tradycyjnych metodach produkcji byłoby ekonomicznie nieopłacalne.
Wyzwania stojące przed inżynierią przyszłości
Mimo ogromnego entuzjazmu w świecie nauki, przed komercyjnym wdrożeniem tej technologii stoi jeszcze kilka poważnych barier. Obecna wersja systemu opiera się na aktywacji termicznej. Oznacza to, że czas reakcji sztucznego mięśnia (ogrzewanie i chłodzenie) oraz jego efektywność energetyczna wciąż pozostawiają sporo do życzenia. Przenoszenie ciepła w głąb grubszego materiału bywa powolne, co ogranicza dynamikę ruchów robota.
Dodatkowo, struktury te znajdują się obecnie w fazie laboratoryjnej. Ich udźwig oraz odporność na zmęczenie materiału przy wielokrotnym powtarzaniu cykli nie są jeszcze gotowe, by zastąpić tradycyjne, potężne siłowniki hydrauliczne czy elektryczne w ciężkim przemyśle. Niemniej jednak, harwardzki krok milowy w programowaniu materii wyznacza zupełnie nowy kierunek rozwoju. Pokazuje, że przyszłość robotyki nie musi być wykuta z żelaza i stali – może być miękka, elastyczna i zaskakująco bliska naturze.
Sztuczne mięśnie z programowalną strukturą molekularną to bez wątpienia jeden z najważniejszych przełomów w dziedzinie robotyki miękkiej ostatnich lat. Eliminacja ciężkich systemów sterowania, przewodów i kompresorów na rzecz inteligentnych właściwości samego materiału otwiera drzwi do budowy maszyn nowej generacji. Choć inżynierowie z Harvardu muszą jeszcze rozwiązać problem szybkości reakcji termicznej, ich praca stanowi solidny fundament pod przyszłą rewolucję w medycynie, protetyce i codziennej koegzystencji ludzi z robotami.



Technogadżet w liczbach